Usage
Here I show an example of the geo-rectification process using a photograph of NIES’ long-term monitoring taken at Tateyama Murodo-Sanso, Toyama prefecture, Japan.
# Loading requirements
from alproj.surface import get_colored_surface
from alproj.project import sim_image, reverse_proj, to_geotiff
from alproj.gcp import image_match, set_gcp, filter_gcp_distance
from alproj.optimize import CMAOptimizer, LsqOptimizer
import rasterio
import cv2
Data Preparation
You should prepare below before starting.
The target landscape photograph.

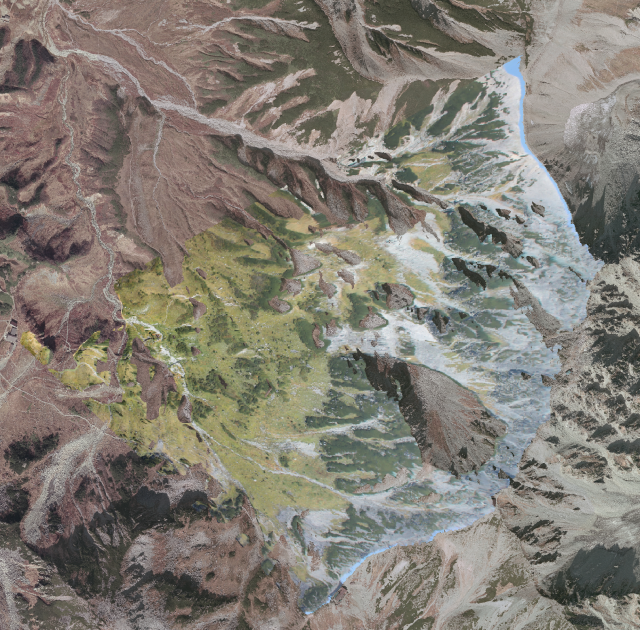
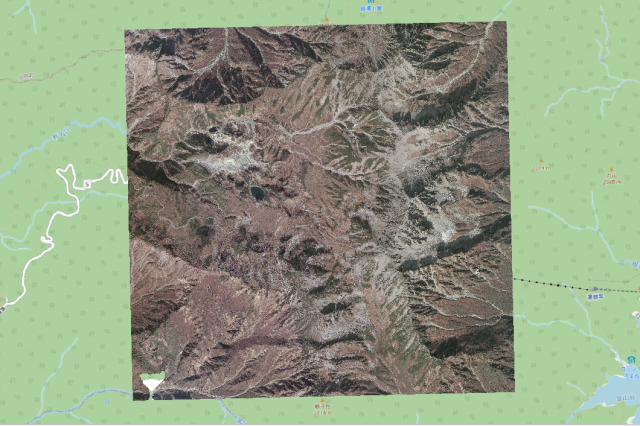
An orthorectificated airborne photograph.
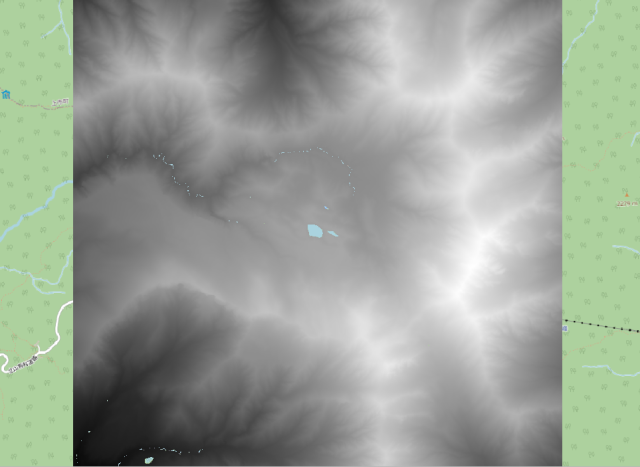
A Digital Surface Model.
Both the airborne photograph and the DSM must cover hole the area where the target photograph covers. Both of them must be in the same planar Coordinate Reference System, e.g. Universal Transverse Mercator Coordinate System (UTM).
Loading Raster Data
First, load the airborne photograph and the DSM using rasterio.
res = 1.0 # Resolution in m
aerial = rasterio.open("airborne.tif")
dsm = rasterio.open("dsm.tif")
Define Initial Camera Parameters
Setting initial camera parameters for optimization.
x, y, z: A shooting point coordinate in the CRS of the aerial photograph / DSM. These can also be optimized to correct GPS errors.
fov: A Field of View in degree.
pan, tilt, roll: A set of Euler angles of the camera in degree.
a1 ~ s4: Distortion coefficients. See Algorithm for detail.
w, h: The width and height of the target image in pixel.
cx, cy: A coordinate of the principal point in pixel.
params = {"x":732731,"y":4051171, "z":2458, "fov":70, "pan":100, "tilt":0, "roll":0,\
"a1":1, "a2":1, "k1":0, "k2":0, "k3":0, "k4":0, "k5":0, "k6":0, \
"p1":0, "p2":0, "s1":0, "s2":0, "s3":0, "s4":0, \
"w":5616, "h":3744, "cx":5616/2, "cy":3744/2}
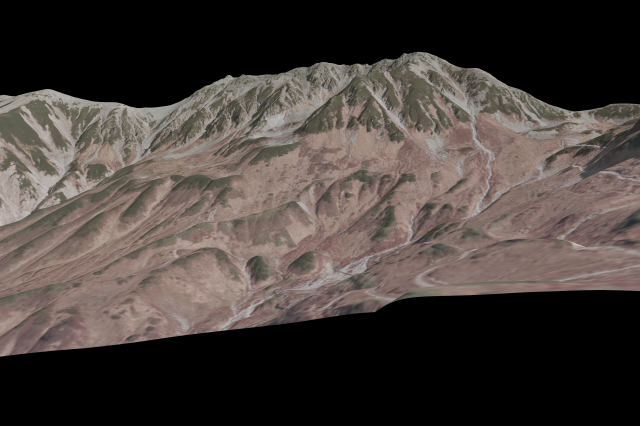
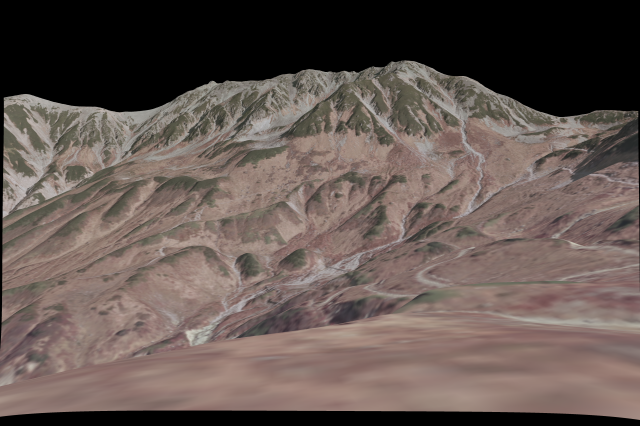
Rendering a Simulated Landscape Image
To find a set of Ground Control Points, render a simulated landscape image with the aerial photograph, DSM, and the initial camera parameters.
First, get colored surface from aerial photograph and DSM.
distance = 3000 # Distance from shooting point in meters
vert, col, ind, offsets = get_colored_surface(aerial, dsm, shooting_point=params, distance=distance, res=res) # This takes some minutes.
Then you’ll get four np.arrays looks like below.
vert
Vertex coordinates of each point relative to offsets. In x, z, y order.
>>> vert array([[3.00000000e+03, 3.84212890e+02, 4.65500000e+03], [3.00100000e+03, 3.82377200e+02, 4.65500000e+03], [2.99900000e+03, 3.84474370e+02, 4.65400000e+03], ..., [2.23200000e+03, 9.98540000e-01, 0.00000000e+00], [2.23300000e+03, 5.04880000e-01, 0.00000000e+00], [2.23400000e+03, 0.00000000e+00, 0.00000000e+00]])
col
Vertex colors in 0 to 1.
>>> col array([[0.37647059, 0.35686275, 0.32156863], [0.36078431, 0.33333333, 0.30980392], [0.42352941, 0.40392157, 0.36078431], ..., [0. , 0. , 0. ], [0. , 0. , 0. ], [0. , 0. , 0. ]])
ind
The index shows which three points form a triangle.
>>> ind array([[ 0, 3, 4], [ 0, 4, 1], [ 1, 4, 5], ..., [7877844, 7878551, 7877845], [7877845, 7878551, 7878552], [7877845, 7878552, 7877846]], dtype=int64)
offsets
Offset values for vertex coordinates. You need to pass this to
sim_imageandreverse_proj.>>> offsets array([7.31942032e+05, 2.15609204e+03, 4.04854197e+06])
Next, render a simulated landscape image. You can optionally use min_distance to mask pixels closer than a specified distance (useful for preventing mismatches with near-field objects).
sim = sim_image(vert, col, ind, params, offsets, min_distance=100) # mask closer than 100m
cv2.imwrite("sim_initial.png", sim)
Every pixel in this image has geographic coordinates. Then you can get a table of image coordinates and geographic coordinates of it.
df = reverse_proj(sim, vert, ind, params, offsets)
>>> df
u v x y z B G R
2058832 3376 366 734200.3125 4050691.75 2988.827881 116.0 120.0 124.0
2058833 3377 366 734199.6875 4050691.75 2988.624268 106.0 110.0 113.0
2058834 3378 366 734198.7500 4050691.25 2988.337402 82.0 86.0 88.0
2058835 3379 366 734198.0000 4050691.25 2988.081543 70.0 75.0 78.0
2058836 3380 366 734197.3750 4050691.25 2987.862061 60.0 65.0 68.0
... ... ... ... ... ... ... ... ...
21026299 5611 3743 732740.3125 4051161.75 2453.355469 113.0 117.0 148.0
21026300 5612 3743 732740.3125 4051161.75 2453.355469 113.0 117.0 148.0
21026301 5613 3743 732740.3125 4051161.75 2453.355713 113.0 117.0 148.0
21026302 5614 3743 732740.3125 4051161.75 2453.355713 113.0 117.0 148.0
21026303 5615 3743 732740.3125 4051161.75 2453.355713 113.0 117.0 148.0
[17336750 rows x 8 columns]
Finding Ground Contorol Points
Then, you can add some Ground Contorol Points (GCPs) in the target image by matching target image and simulated image.
path_org = "target_image.jpg"
path_sim = "sim_initial.png"
Recommended Matching Methods
1. SIFT (Lightweight, No Extra Dependencies)
SIFT is a classic feature matching method that works with the core modules only. It’s lightweight and suitable for images with similar resolution and good texture.
match, plot = image_match(path_org, path_sim, method="sift", plot_result=True)
cv2.imwrite("matched.png", plot)
gcps = set_gcp(match, df)
2. SuperPoint-LightGlue (Robust to Resolution Differences, Lightweight)
SuperPoint with LightGlue provides robust matching even when the simulated image and real photograph have different resolutions. It’s relatively lightweight and fast.
Requires the vismatch package:
pip install alproj[vismatch]
match, plot = image_match(path_org, path_sim, method="superpoint-lightglue", plot_result=True)
cv2.imwrite("matched.png", plot)
gcps = set_gcp(match, df)
3. MiniMa-RoMa (High Performance, Computationally Heavy)
MiniMa-RoMa is a dense matching method that achieves excellent performance on challenging image pairs. It’s computationally heavy but provides the best matching quality for difficult cases.
Requires the vismatch package:
pip install alproj[vismatch]
match, plot = image_match(path_org, path_sim, method="minima-roma", plot_result=True)
cv2.imwrite("matched.png", plot)
gcps = set_gcp(match, df)
Comparison of Matching Methods
The table below shows the comparison of all available methods on a 5616x3744 pixel image pair (CPU on M4 Pro MBP).
Built-in methods (no extra dependencies):
Method |
Time |
Matches |
Notes |
|---|---|---|---|
akaze |
~1 sec |
176 |
Fastest, fewer matches |
sift |
~4 sec |
331 |
Good balance for simple cases |
LightGlue-based methods (lightweight, handles full resolution):
Method |
Time |
Matches |
Notes |
|---|---|---|---|
sift-lightglue |
~3 sec |
518 |
SIFT features + LightGlue matcher |
superpoint-lightglue |
~4 sec |
962 |
Recommended for most cases |
aliked-lightglue |
~6 sec |
815 |
ALIKED features + LightGlue matcher |
minima-superpoint-lightglue |
~29 sec |
973 |
MiniMa preprocessing + SuperPoint |
Semi-dense methods:
Method |
Time |
Matches |
Notes |
|---|---|---|---|
xfeat-star |
~14 sec |
112 |
XFeat semi-dense matching |
Dense matching methods (high match count, auto-resized to 640px):
Method |
Time |
Matches |
Notes |
|---|---|---|---|
tiny-roma |
~2 sec |
2047 |
Fast dense matching |
loftr |
~2 sec |
2198 |
Good for low-texture regions |
minima-loftr |
~3 sec |
2629 |
MiniMa + LoFTR |
ufm |
~10 sec |
2048 |
UFM matching |
rdd |
~14 sec |
1494 |
RDD matching |
roma |
~23 sec |
2048 |
RoMa dense matching |
master |
~327 sec |
3515 |
MASTER matching (large model) |
minima-roma |
GPU only |
- |
Best quality, large model requires CUDA |
minima-roma-tiny |
~2 sec (est.) |
- |
CPU-compatible variant of MiniMa-RoMa |
Note: Dense matching methods (non-LightGlue) automatically resize images to 640px when resize is not specified to prevent out-of-memory errors. Keypoints are scaled back to original coordinates.
You can reproduce this comparison using the script scripts/compare_matching_methods.py.
SIFT result:
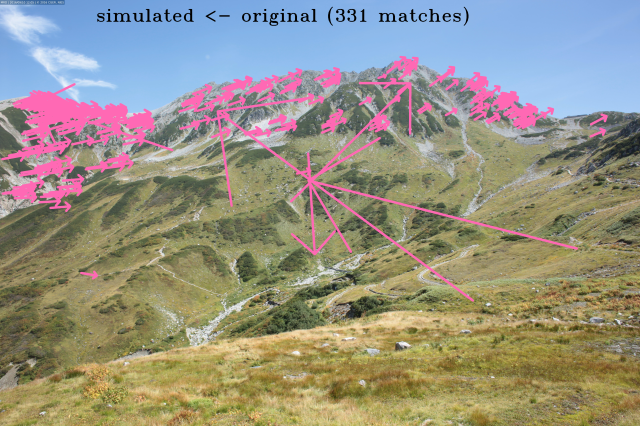
SuperPoint-LightGlue result:
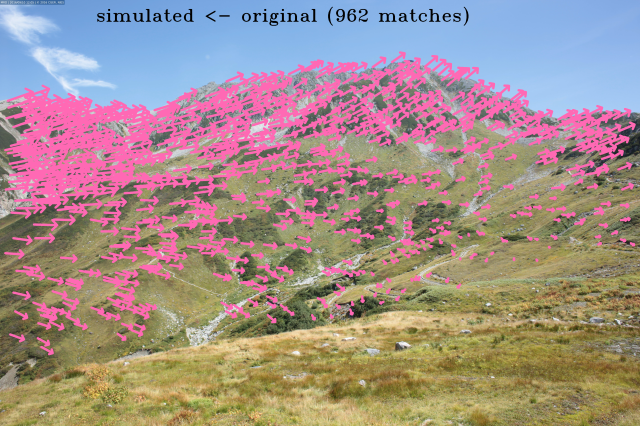
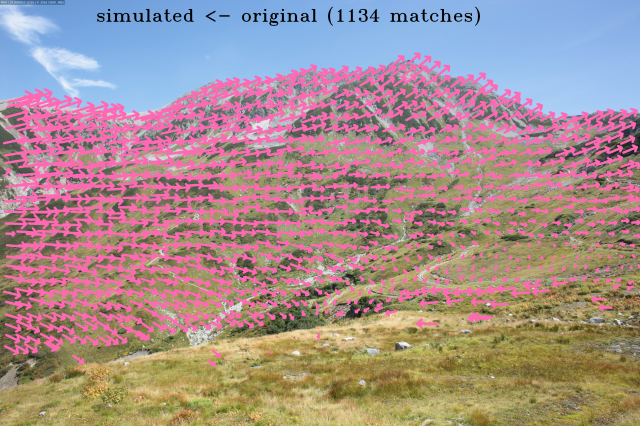
MiniMa-RoMa result:

For most cases, SuperPoint-LightGlue provides a good balance between speed and robustness. Use SIFT when you cannot install additional dependencies, or MiniMa-RoMa when you need the highest matching quality for difficult image pairs.
Outlier Filtering
By default, image_match() applies Fundamental Matrix filtering (outlier_filter="fundamental").
You can also use Essential Matrix filtering when camera parameters are available:
# Essential Matrix filtering (recommended when params with fov is available)
match, plot = image_match(
path_org, path_sim,
method="minima-roma",
outlier_filter="essential", # "essential", "fundamental", or "none"
params=params, # camera params with fov, w, h (focal length computed automatically)
threshold=10.0, # MAGSAC threshold in pixels
plot_result=True
)
Outlier filtering methods:
"fundamental": Fundamental Matrix with MAGSAC++ (default, no camera intrinsics required)"essential": Essential Matrix with MAGSAC++ (recommended whenparamswithfovis provided)"none": No filtering. Use this when you plan to apply custom filtering later.
Spatial Thinning
When using dense matching methods like MiniMa-RoMa, matches may cluster in certain regions of the image. Use spatial thinning to ensure uniform distribution:
# Match with spatial thinning (keeps at most 1 point per 100x100 pixel region)
match, plot = image_match(
path_org, path_sim,
method="minima-roma",
spatial_thin_grid=50, # Grid cell size in pixels
spatial_thin_selection="center", # "first", "random", or "center"
device="cuda",
plot_result=True
)
Selection methods:
"first": Keeps the first point by input order (fastest, deterministic)"random": Random selection (usespatial_thin_random_statefor reproducibility)"center": Keeps the point closest to the cell center (best for uniform distribution)
Spatial thinning is applied AFTER geometric outlier filtering, so it samples from inliers only.
Distance-based GCP Filtering
After creating GCPs with set_gcp(), you can filter them based on 3D distance from the camera:
from alproj.gcp import image_match, set_gcp, filter_gcp_distance
# Create GCPs from matches
gcps = set_gcp(match, df)
# Filter: exclude points closer than 100m or farther than 2000m
gcps = filter_gcp_distance(gcps, params, min_distance=100, max_distance=2000)
This is useful for:
Excluding nearby foreground objects (min_distance)
Excluding distant features with poor depth accuracy (max_distance)
Important: Coordinates must be in a projected CRS (e.g., UTM) for accurate Euclidean distance. Using lat/lon directly will produce incorrect results.
All Available Methods
Built-in (no extra dependencies):
With vismatch package (pip install alproj[vismatch]):
Any method supported by vismatch (70+ models) can be used. Some popular choices:
sift-lightglue, superpoint-lightglue, disk-lightglue, aliked-lightglue, dedode-lightglue: LightGlue-based (lightweight, handles full resolution)
xfeat, xfeat-lightglue, xfeat-star: XFeat variants (fast and lightweight)
roma, romav2, tiny-roma, minima-roma: RoMa variants (dense matching)
loftr, eloftr, minima-loftr: LoFTR variants (good for low-texture regions)
ufm, rdd, master, duster, edm: Other dense matching methods
See the vismatch README for the full list.
>>> gcps
u v x y z
0 1468 2751 733134.120287 4.051270e+06 2367.014130
1 2362 1271 733733.878100 4.051172e+06 2613.651184
2 5116 2709 732801.371752 4.051120e+06 2441.953796
3 644 2253 733323.715014 4.051434e+06 2401.383240
4 3944 953 733846.427660 4.050684e+06 2738.904907
... ... ... ... ... ...
1122 2850 1748 733444.243822 4.051082e+06 2480.453796
1123 3950 1132 733707.379809 4.050744e+06 2655.842163
1124 1043 1969 733419.895678 4.051407e+06 2440.836182
1125 750 1765 733541.844896 4.051506e+06 2479.430786
1126 3454 824 733863.009447 4.050836e+06 2778.318420
[1127 rows x 5 columns]
Where u and v stands for the x and y axis coordinates in the image coordinate system.
Optimization of Camera Parameters
Finally, optimizing camera parameters using GCPs. Camera parameters are optimized by minimizing reproection errors. You can specify which parameters to be optimized, including camera position (x, y, z).
Two optimizers are available:
CMAOptimizer (Recommended for Global Search)
CMAOptimizer uses CMA-ES evolution strategy.
Good for difficult cases when the initial guess is far from optimal.
Supports Huber loss (f_scale parameter) for robustness against outliers.
obj_points = gcps[["x","y","z"]]
img_points = gcps[["u","v"]]
# Phase 1: Optimize position, orientation, fov, and aspect ratio
cma_optimizer = CMAOptimizer(obj_points, img_points, params)
cma_optimizer.set_target(["x", "y", "z", "fov", "pan", "tilt", "roll", "a1", "a2"])
params_optim, error = cma_optimizer.optimize(
generation=300,
sigma=1.0,
population_size=50,
f_scale=10.0 # Huber loss threshold in pixels (robust to outliers)
)
print("Error:", error)
After Phase 1, you can perform image matching again with the improved parameters and optimize distortion parameters:
# Phase 2: Optimize distortion parameters with refined matches
cma_optimizer = CMAOptimizer(gcps[["x","y","z"]], gcps[["u","v"]], params_optim)
cma_optimizer.set_target(["k1", "k2", "k3", "k4", "k5", "k6", "p1", "p2", "s1", "s2", "s3", "s4"])
params_optim, error = cma_optimizer.optimize(
generation=300,
sigma=1.0,
population_size=50,
f_scale=10.0
)
Key parameters:
generation: Number of generations to run (more = better convergence, slower)sigma: Initial standard deviation in normalized [0, 1] spacepopulation_size: Number of candidate solutions per generationf_scale: Huber loss threshold in pixels (if None, uses RMSE)bound_widths: Width from initial value for each parameter (default: ±45° for angles, ±30m for position, ±0.2 for distortion)
LsqOptimizer (Fast Local Refinement)
LsqOptimizer uses scipy’s least_squares with Trust Region Reflective algorithm.
Much faster than CMA-ES but requires a good initial guess. Supports robust loss functions.
lsq_optimizer = LsqOptimizer(obj_points, img_points, params)
lsq_optimizer.set_target(["k1", "k2", "k3", "k4", "k5", "k6", "p1", "p2", "s1", "s2", "s3", "s4"])
params_optim, error = lsq_optimizer.optimize(
method="trf", # "trf", "dogbox", or "lm"
loss="huber", # "linear", "huber", "soft_l1", "cauchy", "arctan"
f_scale=10.0, # threshold for robust loss functions
max_nfev=1000 # maximum number of function evaluations
)
Key parameters:
method: Algorithm to use (“trf” recommended, “lm” does not support bounds/robust loss)loss: Loss function (“huber” and “soft_l1” are robust to outliers)f_scale: Soft threshold for residuals (larger = more tolerance to outliers)
The optimized camera parameters reproduces the target image exactly.
```python
sim_optim = sim_image(vert, col, ind, params_optim, offsets)
cv2.imwrite("sim_optimized.png", sim_optim)
Reverse Projection
Now you can get geographic coordinates of each pixel of the target image.
original = cv2.imread("target_image.jpg")
georectified = reverse_proj(original, vert, ind, params_optim, offsets)
>>> georectified
u v x y z B G R
3030570 3546 539 734196.643725 4.050693e+06 2987.922119 193.0 153.0 128.0
3030571 3547 539 734195.270678 4.050693e+06 2987.445068 195.0 155.0 130.0
3030572 3548 539 734193.905932 4.050693e+06 2986.971313 192.0 154.0 124.0
3030573 3549 539 734192.899340 4.050693e+06 2986.625610 187.0 149.0 119.0
3030574 3550 539 734192.235033 4.050693e+06 2986.404175 186.0 149.0 115.0
... ... ... ... ... ... ... ... ...
20655647 5615 3677 732743.775072 4.051166e+06 2452.745117 130.0 174.0 191.0
20661260 5612 3678 732743.765063 4.051166e+06 2452.746643 115.0 161.0 179.0
20661261 5613 3678 732743.764086 4.051166e+06 2452.746887 115.0 161.0 179.0
20661262 5614 3678 732743.764086 4.051166e+06 2452.746887 119.0 165.0 182.0
20661263 5615 3678 732743.762987 4.051166e+06 2452.747192 124.0 170.0 187.0
[15678803 rows x 8 columns]
Exporting to GeoTIFF
You can convert the reverse projection output directly to a GeoTIFF using the built-in to_geotiff() function:
from alproj.project import to_geotiff
# Convert to GeoTIFF with automatic rasterization and interpolation
to_geotiff(
georectified,
"output.tif",
resolution=1.0, # Pixel resolution in coordinate units (e.g., meters)
crs="EPSG:6690", # Coordinate Reference System
bands=["R", "G", "B"], # Which columns to use as bands
interpolate=True, # Fill small gaps using focal statistics
max_dist=1.0, # Maximum interpolation distance
agg_func="mean", # Aggregation function: "mean", "median", "max", "min"
nodata=255 # NoData value for missing pixels
)
You can also export to CSV for use with other tools:
georectified.to_csv("georectified.csv", index=False)
Result Plot